
All figures (13)

Fig. 8. Spin images comparison examples. 
Fig. 10. The Stanford Bunny with self occlusion. 
Fig. 6. Matching points. 
Fig. 7. Sets of 4 points used to compute rigid transformation. 
Fig. 9. The Stanford Bunny with a white noise based on the average edge length. 
Fig. 1. Example of spin image computation. 
Fig. 11. Simulation using the OpenHRP simulator. 
Fig. 12. Experiment on a single view of the HRP2 humanoid robot 
Fig. 3. Model induces by the surface nature of the pixels. 
Fig. 2. Two ways to fill a spin-image: (a) direct way (b) bilinear interpolation. 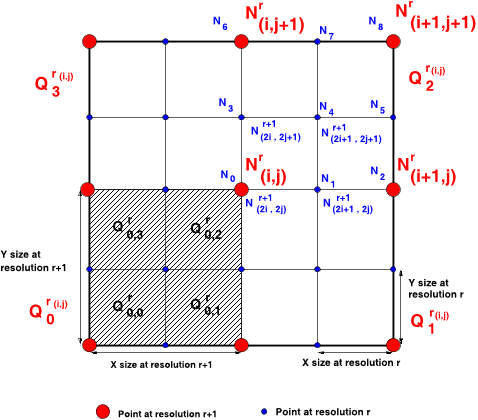
Fig. 4. Computing bilinear interpolated spin-images from one resolution to the other. 
TABLE I COEFFICIENTS FOR COMPUTING THE MULTI-RESOLUTION BILINEAR INTERPOLATION 
Fig. 5. A 3D mesh extracted from the Stanford Bunny flying in the OpenHRP simulator. The scene is cut according to the bounding box model.












01 Oct 2006-