
All figures (11)

Fig. 4. BMI adaptive scheme employed in this paper. 
Fig. 5. Block diagram of the tacit learning-based synergetic motor control paradigm. 
TABLE III ONLINE PERFORMANCE ON MULTIJOINT ROBOT ARM ADAPTIVE BMI CONTROL WITH DIFFERENT LOAD CONDITIONS 
Fig. 6. Topographical plot of brain activation during −500 to 1000 ms for (a) left-hand MI and (b) right-hand MI for subject 6.0 ms marks the onset of the task. 
Fig. 10. Trace of the movement of the robot arm during simultaneous multiDOF robot control which is driven by the subject motor intention through co-adaptive BMI. The robot is holding (a) 300 g load, (b) 600 g load. The joint angle variance on shoulder and wrist for the heavier weight condition has become half compared to lighter weight condition. 
Fig. 9. Subject performing the online control of multi-DOF robot in a simultaneous way by using co-adaptive BMI. The black dots indicate the targets for the subjects in the vertical plane. 
TABLE I TRAINING RESULTS OF THE DECODER DURING NO ADAPTATION AND ADAPTATION 
Fig. 1. BMI paradigm employed in this paper for simultaneous control of multi-DOFs robot using adaptive left-right MI decoder and synergetic motor learning for peripheric joint redundancy management. The black dots indicate the targets for the subjects in the vertical plane. 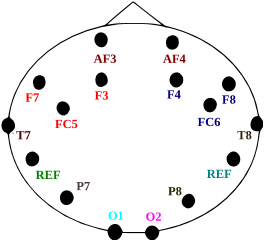
Fig. 2. Standard 10–20 representation of the electrodes present in an Emotiv headset. 
Fig. 8. Endpoint transition of robot with load (a) 300 g and trajectory of the shoulder-elbow-wrist joints for 300 g load and (b) 600 g and trajectory of the shoulder-elbow-wrist joints for 600 g load. (c) Phase potrait of joint angle-angular velocity for the shoulder-elbow joints at different weight conditions. (d) Energy consumption of time sequential changes in one cycle of up/down motion with 600 g load along with its FB component and FF component. 
Fig. 3. Timing diagram of a single trial to train the subject in left and right hand MI (as indicated by left and right arrow, respectively).











26 May 2016-