Elastomeric Origami: Programmable Paper-Elastomer Composites as Pneumatic Actuators
TL;DR: In this article, the development of soft pneumatic actuators based on composites consisting of elastomers with embedded sheet or fiber structures (e.g., paper or fabric) that are flexible but not extensible is described.
Abstract: The development of soft pneumatic actuators based on composites consisting of elastomers with embedded sheet or fiber structures (e.g., paper or fabric) that are flexible but not extensible is described. On pneumatic inflation, these actuators move anisotropically, based on the motions accessible by their composite structures. They are inexpensive, simple to fabricate, light in weight, and easy to actuate. This class of structure is versatile: the same principles of design lead to actuators that respond to pressurization with a wide range of motions (bending, extension, contraction, twisting, and others). Paper, when used to introduce anisotropy into elastomers, can be readily folded into 3D structures following the principles of origami; these folded structures increase the stiffness and anisotropy of the elastomeric actuators, while being light in weight. These soft actuators can manipulate objects with moderate performance; for example, they can lift loads up to 120 times their weight. They can also be combined with other components, for example, electrical components, to increase their functionality.
Figures (10)

Figure 8. Bellows actuators, fabricated by limiting the elongation of their pleats. a) A bellows actuator that bends in a U-shape. b) A bellows actuator with two bending modes. c) A bellows actuator with a strip (in red) limiting the expansion of the pleats. The strip was built on the outside of the device for the sake of clarity. 
Figure 9. A twisting actuator with a helical patterned paper strip wrapped around a cylindrical pneumatic channel. a) The three-dimensional pattern of the paper. b) The fabrication process is similar to the one shown in Figure 4: the paper with the pattern shown in a) is first inserted into a cylindrical mold. An elastomer pre-mixtured is then poured into the mold, and cured with the patterned paper embedded. Finally, sealing the top and bottom completes the pneumatic channel. c), d), and e) show the resting and actuated states of such a device under an applied pressure of P1= 50 mbar and P2= 120 mbar respectively. f) and g) Pressure dependence of the twisting angle and the elongation after 50 pressurization/depressurization cycles. 
Figure 4. A contracting actuator that is composed of longitudinally patterned paper stripes rolled around a cylindrical pneumatic channel. a) The two-dimensional pattern of the paper. b) Schematic representation of the fabrication process: the paper with the pattern shown in a) is first rolled into a cylinder, and inserted into a cylindrical mold. A pre-mixed elastomer is then poured into the mold, and cured with the patterned paper embedded. The pneumatic chamber is completed by sealing the top and bottom against two circular pieces of paper embedded in elastomer. c), d), and e) show the resting and actuated states of such a device under atmospheric pressure (Patm), P1= 80 mbar, and P2= 200 mbar, respectively. f) Dependence on pressure of the contraction factor (Eq. 1) after 50 pressurization/depressurization cycles. The error bars show the standard deviation from the mean values. 
Figure 5. An elongation actuator with paper folded into a bellows-like pattern around a cylindrical pneumatic channel. a) The three-dimensional bellows-like pattern of the paper. b) The fabrication process is similar to the one shown in Figure 3: the paper with the pattern shown in a) is first inserted into a cylindrical mold. An elastomer pre-mixture is then poured into the mold, and cured with the patterned paper embedded. Finally, sealing the top and bottom completes the pneumatic channel. c) Pressure dependence of the extension (relative to its original length in the resting state) after 50 pressurization/depressurization cycles. d), e), and f) show the resting and actuated states of such a device under atmospheric pressure (Patm), P1= 50 mbar, and P2= 170 mbar, respectively. 
Figure 1. Schematic diagram outlining the fabrication of pneumatic soft actuators based on programmable paper-elastomer composites. a) Fabrication. First, an elastomer pre-mixture is poured over a mold with features designed to form the pneumatic channels. After curing, it is peeled off the mold, and placed in contact with a piece of paper soaked with uncured elastomer pre-mixture. Finally, the assembly is thermally cured to generate a sealed pneumatic channel. The final device is unsymmetrical in its mechanical response, because the top and bottom layers (elastomer and paper soaked with elastomer, respectively) have very different mechanical properties. 
Figure 6. Origami extension actuator lifting a standard weight of 1 kg. A transparent tube was used to constrain the weight and origami actuator to a common vertical axis during the lifting. The pressure inside the pneumatic chamber of the actuator required to lift the weight to maximum extension of the actuator was 238 mbar. The actuator weighed 8.3 g. The arrows indicate the polyethylene tubes used to supply compressed air for actuation. 
Figure 2. Comparison between the actuation of a pneumatic channel in a homogeneous elastomeric matrix, and in a paper-elastomer composite, under 100 mbar of pressure (1,013.25 mbar = 1 atm). a), b) Finite element analysis, and real device, showing the symmetrical deformation of an actuator fabricated in a single material. c), d) Finite-element analysis, and real device, showing the asymmetrical deformation of a paper-elastomer composite actuator upon pressurization. The schematics are sections along the center of the long axis of the structures. In this example, the higher tensile strength of the paper limits the extension of the elastomeric matrix, and results in bending of the device on pressurization. 
Figure 10. A contraction actuator that couples inflation of an Ecoflex cylindrical shell reinforced with aluminum foil to emission of blue light upon pressurization. a) Twodimensional pattern of the composite of paper and aluminum foil. b) Folded structure rolled into a cylinder to fabricate the actuator. c) Aluminum foil was used (composed with paper and Ecoflex) to fabricate a bendable structure that allows electrical conduction to a blue LED housed in the internal chamber from the outside. The anode of the LED is connected to the top aluminum cap (electrically connected through the aluminum cylinder). The cathode of the LED is connected to the bottom aluminum cap (isolated from the anode with Ecoflex). d), e), and f) Resting and actuated states of such a device with the LED on. Patm= atmospheric pressure, P1= 100 mbar, and P2= 285 mbar, respectively. The exposure time was longer for e) and f) than d). g) Dependence of the contraction with the applied pressure after 50 pressurization/depressurization cycles h) Dependence of the normalized luminous intensity (in the far field) with the internal pressurization of the device. 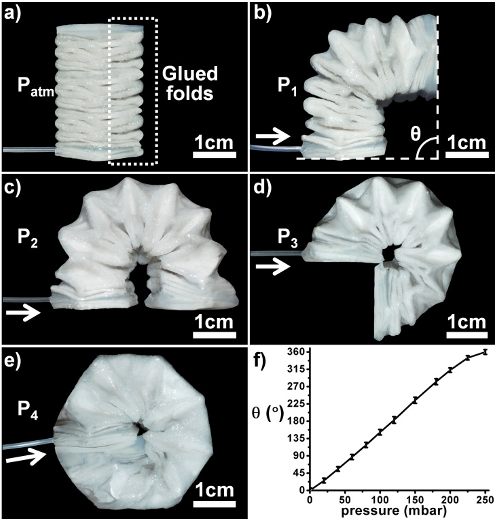
Figure 7. A biased bellows actuator, fabricated by modifying the elongation actuator in Figure 5. a) The three-dimensional bellows-like pattern of the paper, the same design in Figure 5. b) The fabrication process is similar to the one shown in Figure 5 except that the right edges of the paper structure were glued together. The elongation is possible from the left side of the device. c), d), and e) show the resting and actuated states of such a device under P1= 60 mbar, P2= 125 mbar, P3= 175 mbar, and P4= 250 mbar, respectively. f) Dependence of the angle θ on pressure after 50 cycles of pressurization/depressurization. The small standard deviation (error bars) indicates that θ does not change significantly as a function of the number of cycles. 
Figure 3. A contracting actuator consisting of multiple stages of bending actuators sharing a single pneumatic channel. a) The schematics of the design showing the layout of the pneumatic channel and the paper. b), c), and d) show the resting state (Patm) and two different actuated states (P1 and P2) of such a device, respectively. Left inset in b) correspond to the optical image of the lateral cross section of the device. The right inset in b) corresponds to the SEM image of the perpendicular cross section of the device. P1= 70 mbar P2= 220 mbar. The arrows indicate the polyethylene tubes used to supply compressed air for actuation.










Citations
More filters
TL;DR: In this article, a pneumatic actuator can bend from a linear to a quasicircular shape in 50 ms when pressurized at Δ P = 345 kPa.
Abstract: Soft robots actuated by infl ation of a pneumatic network (a “pneu-net”) of small channels in elastomeric materials are appealing for producing sophisticated motions with simple controls. Although current designs of pneu-nets achieve motion with large amplitudes, they do so relatively slowly (over seconds). This paper describes a new design for pneu-nets that reduces the amount of gas needed for infl ation of the pneu-net, and thus increases its speed of actuation. A simple actuator can bend from a linear to a quasicircular shape in 50 ms when pressurized at Δ P = 345 kPa. At high rates of pressurization, the path along which the actuator bends depends on this rate. When infl ated fully, the chambers of this new design experience only one-tenth the change in volume of that required for the previous design. This small change in volume requires comparably low levels of strain in the material at maximum amplitudes of actuation, and commensurately low rates of fatigue and failure. This actuator can operate over a million cycles without signifi cant degradation of performance. This design for soft robotic actuators combines high rates of actuation with high reliability of the actuator, and opens new areas of application for them.
1,158 citations
TL;DR: A critical overview of soft robotic grippers is presented, covering different material sets, physical principles, and device architectures, and improved materials, processing methods, and sensing play an important role in future research.
Abstract: Advances in soft robotics, materials science, and stretchable electronics have enabled rapid progress in soft grippers. Here, a critical overview of soft robotic grippers is presented, covering different material sets, physical principles, and device architectures. Soft gripping can be categorized into three technologies, enabling grasping by: a) actuation, b) controlled stiffness, and c) controlled adhesion. A comprehensive review of each type is presented. Compared to rigid grippers, end-effectors fabricated from flexible and soft components can often grasp or manipulate a larger variety of objects. Such grippers are an example of morphological computation, where control complexity is greatly reduced by material softness and mechanical compliance. Advanced materials and soft components, in particular silicone elastomers, shape memory materials, and active polymers and gels, are increasingly investigated for the design of lighter, simpler, and more universal grippers, using the inherent functionality of the materials. Embedding stretchable distributed sensors in or on soft grippers greatly enhances the ways in which the grippers interact with objects. Challenges for soft grippers include miniaturization, robustness, speed, integration of sensing, and control. Improved materials, processing methods, and sensing play an important role in future research.
1,028 citations
TL;DR: This review discusses soft robots which allow actuation with several degrees of freedom, and shows that different actuation mechanisms lead to similar actuators, capable of complex and smooth movements in 3d space.
Abstract: Scientists are exploring elastic and soft forms of robots, electronic skin and energy harvesters, dreaming to mimic nature and to enable novel applications in wide fields, from consumer and mobile appliances to biomedical systems, sports and healthcare. All conceivable classes of materials with a wide range of mechanical, physical and chemical properties are employed, from liquids and gels to organic and inorganic solids. Functionalities never seen before are achieved. In this review we discuss soft robots which allow actuation with several degrees of freedom. We show that different actuation mechanisms lead to similar actuators, capable of complex and smooth movements in 3d space. We introduce latest research examples in sensor skin development and discuss ultraflexible electronic circuits, light emitting diodes and solar cells as examples. Additional functionalities of sensor skin, such as visual sensors inspired by animal eyes, camouflage, self-cleaning and healing and on-skin energy storage and generation are briefly reviewed. Finally, we discuss a paradigm change in energy harvesting, away from hard energy generators to soft ones based on dielectric elastomers. Such systems are shown to work with high energy of conversion, making them potentially interesting for harvesting mechanical energy from human gait, winds and ocean waves.
741 citations
TL;DR: This study provides a set of systematic design rules to help the robotics community create soft actuators by understanding how these vary their outputs as a function of input pressure for a number of geometrical parameters.
Abstract: Soft fluidic actuators consisting of elastomeric matrices with embedded flexible materials are of particular interest to the robotics community because they are affordable and can be easily customized to a given application. However, the significant potential of such actuators is currently limited as their design has typically been based on intuition. In this paper, the principle of operation of these actuators is comprehensively analyzed and described through experimentally validated quasi-static analytical and finite-element method models for bending in free space and force generation when in contact with an object. This study provides a set of systematic design rules to help the robotics community create soft actuators by understanding how these vary their outputs as a function of input pressure for a number of geometrical parameters. Additionally, the proposed analytical model is implemented in a controller demonstrating its ability to convert pressure information to bending angle in real time. Such an understanding of soft multimaterial actuators will allow future design concepts to be rapidly iterated and their performance predicted, thus enabling new and innovative applications that produce more complex motions to be explored.
658 citations
TL;DR: This manuscript describes simple microfluidic networks that can change the color, contrast, pattern, apparent shape, luminescence, and surface temperature of soft machines for camouflage and display that can be changed simultaneously in the visible and infrared.
Abstract: Synthetic systems cannot easily mimic the color-changing abilities of animals such as cephalopods. Soft machines--machines fabricated from soft polymers and flexible reinforcing sheets--are rapidly increasing in functionality. This manuscript describes simple microfluidic networks that can change the color, contrast, pattern, apparent shape, luminescence, and surface temperature of soft machines for camouflage and display. The color of these microfluidic networks can be changed simultaneously in the visible and infrared--a capability that organisms do not have. These strategies begin to imitate the functions, although not the anatomies, of color-changing animals.
633 citations
References
More filters
TL;DR: This protocol provides an introduction to soft lithography—a collection of techniques based on printing, molding and embossing with an elastomeric stamp that has emerged as a technology useful for a number of applications that include cell biology, microfluidics, lab-on-a-chip, microelectromechanical systems and flexible electronics/photonics.
Abstract: This protocol provides an introduction to soft lithography--a collection of techniques based on printing, molding and embossing with an elastomeric stamp. Soft lithography provides access to three-dimensional and curved structures, tolerates a wide variety of materials, generates well-defined and controllable surface chemistries, and is generally compatible with biological applications. It is also low in cost, experimentally convenient and has emerged as a technology useful for a number of applications that include cell biology, microfluidics, lab-on-a-chip, microelectromechanical systems and flexible electronics/photonics. As examples, here we focus on three of the commonly used soft lithographic techniques: (i) microcontact printing of alkanethiols and proteins on gold-coated and glass substrates; (ii) replica molding for fabrication of microfluidic devices in poly(dimethyl siloxane), and of nanostructures in polyurethane or epoxy; and (iii) solvent-assisted micromolding of nanostructures in poly(methyl methacrylate).
1,954 citations
TL;DR: This discussion elucidates what has been articulated in different ways by a number of researchers in the past several years, namely that constant-curvature kinematics can be considered as consisting of two separate submappings: one that is general and applies to all continuum robots, and another that is robot-specific.
Abstract: Continuum robotics has rapidly become a rich and diverse area of research, with many designs and applications demonstrated. Despite this diversity in form and purpose, there exists remarkable similarity in the fundamental simplified kinematic models that have been applied to continuum robots. However, this can easily be obscured, especially to a newcomer to the field, by the different applications, coordinate frame choices, and analytical formalisms employed. In this paper we review several modeling approaches in a common frame and notational convention, illustrating that for piecewise constant curvature, they produce identical results. This discussion elucidates what has been articulated in different ways by a number of researchers in the past several years, namely that constant-curvature kinematics can be considered as consisting of two separate submappings: one that is general and applies to all continuum robots, and another that is robot-specific. These mappings are then developed both for the single-section and for the multi-section case. Similarly, we discuss the decomposition of differential kinematics (the robotâ??s Jacobian) into robot-specific and robot-independent portions. The paper concludes with a perspective on several of the themes of current research that are shaping the future of continuum robotics.
1,600 citations
TL;DR: In this article, the authors discuss the capabilities of soft robots, describe examples from nature that provide biological inspiration, surveys the state of the art and outlines existing challenges in soft robot design, modelling, fabrication and control.
Abstract: Traditional robots have rigid underlying structures that limit their ability to interact with their environment. For example, conventional robot manipulators have rigid links and can manipulate objects using only their specialised end effectors. These robots often encounter difficulties operating in unstructured and highly congested environments. A variety of animals and plants exhibit complex movement with soft structures devoid of rigid components. Muscular hydrostats e.g. octopus arms and elephant trunks are almost entirely composed of muscle and connective tissue and plant cells can change shape when pressurised by osmosis. Researchers have been inspired by biology to design and build soft robots. With a soft structure and redundant degrees of freedom, these robots can be used for delicate tasks in cluttered and/or unstructured environments. This paper discusses the novel capabilities of soft robots, describes examples from nature that provide biological inspiration, surveys the state of the art and outlines existing challenges in soft robot design, modelling, fabrication and control.
1,295 citations
TL;DR: In this paper, the authors present an introduction to ionic polymer-metal composites and some mathematical modeling pertaining to them and discuss a number of recent findings in connection with ion-exchange polymer metal composites (IPMCS) as biomimetic sensors and actuators.
Abstract: This paper presents an introduction to ionic polymer-metal composites and some mathematical modeling pertaining to them. It further discusses a number of recent findings in connection with ion-exchange polymer-metal composites (IPMCS) as biomimetic sensors and actuators. Strips of these composites can undergo large bending and flapping displacement if an electric field is imposed across their thickness. Thus, in this sense they are large motion actuators. Conversely by bending the composite strip, either quasi-statically or dynamically, a voltage is produced across the thickness of the strip. Thus, they are also large motion sensors. The output voltage can be calibrated for a standard size sensor and correlated to the applied loads or stresses. They can be manufactured and cut in any size and shape. In this paper first the sensing capability of these materials is reported. The preliminary results show the existence of a linear relationship between the output voltage and the imposed displacement for almost all cases. Furthermore, the ability of these IPMCs as large motion actuators and robotic manipulators is presented. Several muscle configurations are constructed to demonstrate the capabilities of these IPMC actuators. This paper further identifies key parameters involving the vibrational and resonance characteristics of sensors and actuators made with IPMCS. When the applied signal frequency varies, so does the displacement up to a critical frequency called the resonant frequency where maximum deformation is observed, beyond which the actuator response is diminished. A data acquisition system was used to measure the parameters involved and record the results in real time basis. Also the load characterizations of the IPMCs were measured and it was shown that these actuators exhibit good force to weight characteristics in the presence of low applied voltages. Finally reported are the cryogenic properties of these muscles for potential utilization in an outer space environment of a few Torrs and temperatures of the order of - 140 degrees Celsius. These muscles are shown to work quite well in such harsh cryogenic environments and thus present a great potential as sensors and actuators that can operate at cryogenic temperatures.
1,050 citations
Book•
16 Jul 2007TL;DR: Aimed primarily at advanced undergraduate and graduate students in mathematics or computer science, this lavishly illustrated book will fascinate a broad audience, from high school students to researchers.
Abstract: How can linkages, pieces of paper, and polyhedra be folded? The authors present hundreds of results and over 60 unsolved 'open problems' in this comprehensive look at the mathematics of folding, with an emphasis on algorithmic or computational aspects. Folding and unfolding problems have been implicit since Albrecht Drer in the early 1500s, but have only recently been studied in the mathematical literature. Over the past decade, there has been a surge of interest in these problems, with applications ranging from robotics to protein folding. A proof shows that it is possible to design a series of jointed bars moving only in a flat plane that can sign a name or trace any other algebraic curve. One remarkable algorithm shows you can fold any straight-line drawing on paper so that the complete drawing can be cut out with one straight scissors cut. Aimed primarily at advanced undergraduate and graduate students in mathematics or computer science, this lavishly illustrated book will fascinate a broad audience, from high school students to researchers.
509 citations
"Elastomeric Origami: Programmable P..." refers background in this paper
...Extensor Origami is an art([27]) (and a science([28])) that guides the fabrication of three-dimensional paper structures by folding....
[...]