Temperature dependence of friction under cryogenic conditions
in vacuum
J. C. Burton, P. Taborek* and J. E. Rutledge
Department of Physics and Astronomy, University of California, 4129 Fredrick Reines Hall, Irvine, CA 92697, USA
Received 12 June 2006; accepted 21 July 2006; published online 26 August 2006
We have constructed a sliding block cryotribometer designed to measure friction at cryogenic temperatures and UHV
conditions. An optical cryostat and high speed video was used to monitor the motion of the block. The temperature range of the
measurements was 4–460 K. Both the static and dynamic friction coefficients were determined for a steel ball on stainless steel,
sapphire, and PTFE (Teflon) plates, and for a sapphire ball on a sapphire plate. For all material combinations, no systematic
variation of friction with temperature was observed in the temperature range 4–200 K.
KEY WORDS: cryotribology, friction test methods, static friction, PTFE, unlubricated wear
1. Introduction
Many thermodynamic and trans port properties of
solids depend dramatically on the temperature. Proper-
ties determined by phonons such as the heat capacity and
thermal diffusivity often differ by orders of magnitude
above and below the Debye temperature. In both metals
and semiconductors, the electrical resistivity can have a
strong temperature dependence, particularly in the
cryogenic regime. Since a fundamental description of
friction between solids involves electronic and phonon
coupling between the interfaces [1], it is of interest to
investigate whether the temperature dependence of the
scattering properties of the elementary excitations is
reflected in observable variation of the friction coeffi-
cients with temperature. More macroscopic theories [2]
of frictional phenomena use models based on effects such
as local melting of asperities, viscoelastic effects, plastic
flow, and tribochemistry [3]. The rates of these processes
have a strong Arrhenius-type temperature dependence,
with the local temperature determined by a balance of
heat generation at the surface and heat flow away from
the sliding surface. At sufficiently low temperatures, the
rate of thermally activated processes becomes vanish-
ingly small, and processes which are important at room
temperature ca n be effectively turned off. Another the-
oretical approach leads to a frictional force with an
additive term that is proportional to the temperature T
and to the logarithm of the sliding velocity [4, 5]. Thus,
from both the fundamental and the macroscopic phe-
nomenological point of view, temperature might be
expected to play an important role in sliding friction,
particularly in the cryogenic regime. Despite this theo-
retical expectation, there have been very few experi -
mental investigations of friction at low temperatures,
and the studies which do exist often involve surfaces in
contact with gases or cryogenic fluids [6–10] which
complicates the interpretation of the data in terms of
interfacial processes. Other experiments have used AFM
techniques to study friction at single asperities on well
characterized single crystal surfaces in vacuum [11].
The purpose of the measurements described here is to
provide a survey of friction behavior over a wide range of
temperature for materials of engineering importance. The
materials we have chosen, stainless steel, Teflon (PTFE),
and sapphire, are repres entative of metals, polymers, and
crystalline insulators whose electronic and mechani cal
properties span a wide range. Friction measurements on
macroscopic samples in vacuum at cryogenic tempera-
tures pose significant experimental challenges and require
special purpose tribometers. We have chosen a concep-
tually simple but rather unusual technique which involves
monitoring the motion of a block sliding down an
inclined plane using high speed video. The video frames
are analyzed to yield the acceleration and force on the
sliding block, from which the sliding friction coefficient
can be determined. The static friction coefficient is
obtained from the critical angle of inclination required to
initiate sliding. Cont rary to our initial expectations, our
results for the friction coefficients show very little tem-
perature dependence in the range 4–200 K. Reproducible
thermal effects wer e observed in the temperature range
200–400 K, but wear was found to be a more important
effect than temperature.
*To whom correspondence should be addressed.
E-mail: ptaborek@uci.edu
1023-8883/06/0800–0131/0 Ó 2006 Springer Science+Business Media, Inc.
Tribology Letters, Vol. 23, No. 2, August 2006 (Ó 2006) 131
DOI: 10.1007/s11249-006-9115-7

2. Experimental methods
Our tribometer consists of a 2cm 1.27cm 1.27cm
copper block which slides in a vee-shaped track
approximately 10 cm long. Two of the faces of the cop-
per block slider have three 3.175 mm (1/8 inch) diameter
balls made from bearing steel attached so that approxi-
mately half of the ball is exposed; these hemispherical
contact points support the load and define the tribolog-
ical contact points. In the limit of zero friction, five
contact points determine the orientation of the slider in
the track, so six contact points over constr ain the system.
The friction coefficients we measure, however, depend
only on the sum of the normal forces exerted by all of the
contact points, and not on the details of the force dis-
tribution. Most of our measurements were done with
steel balls, but one experimental run was done with
sapphire balls (purchased from Small Parts). The balls
make contact with two recta ngular plates mounted at
90 degrees which form the vee. The main body of the
track holder is made of OFHC copper for thermal
management reasons. The tracks are mounted in
machined recesses in the copper body of the track holder
and are replaceable; we used highly polished stainless
steel (McMasterCarr 304 ss mirror-like finish), sapphire
(Crystal Systems, 80–50 optical polish, unknown
crystallographic orientation) and PTFE coated steel
(Dupont 851–214Green PTFE coating 73 microns thick).
A schematic diagram of the slider is shown in figure 1.
The track holder is mounted on a frame which hangs
from the upper surface of a 4 K platform in a cryostat.
The holder is mounted on bushings which allow it to
rotate around a horizontal axis. Its angular position is
controlled by a wire attached to a linear feedthru at the
top of the cryostat. The entire tribometer is completely
enclosed by a copper radiation shield which is attached
to the 4 K platform. Optical access is provided by two
windows of infrared absorbing glass(Schott KG-1). The
4 K shield is inside a 77 K radiation shield which also
has infrared absorbing windows. The cryostat is
mounted in a conventional stainless steel vacuum tank
46 cm in diameter with quartz windows in Conflat ports,
as shown in figure 2. The design of the cryostat is similar
to other optical cryostats used previously in our labo-
ratory [12–14].
While the apparatus is at room temperature, it is
pumped out to a pressure of 10
)6
Torr. Once the radi-
ation shields of the cryostat reach their fina l tempera-
tures of approximately 4 and 77 K, respectively, the
region surrounding the tribometer is effectively cryo-
pumped by the shields, and the pressure presumably
drops to very low values. The temperature of the trib-
ometer is monitored and controlled independently of the
shields using a heater and thermometer attached to the
copper body of the vee-shaped track. Because of the
point-like contacts of the balls, the sliding block makes
poor thermal contact with the track; if this were the only
thermal connection to the track, the temperature of the
block would be impossible to control. To enhance the
thermal contact, a high magnetic permeability disk of
mu metal is attached at one end of the block which can
be attracted to the mu metal core of a solenoid at the
end of the track. The solenoid can hold the block at the
end of the track even when the track is tilted at a large
angle. When the current through the coil is switched off,
the block can slide freely.
Once the block and track have reached a thermal
steady state, the static and kinetic friction coefficients l
s
Figure 1. Schematic diagram showing copper slider supported on ball
bearings which slides on replaceable plates that form a 90 degree vee
track. The mu metal button is used in conjunction with the solenoid to
provide thermal contact to the copper slider and to control the release
of the slider at high inclination angles.
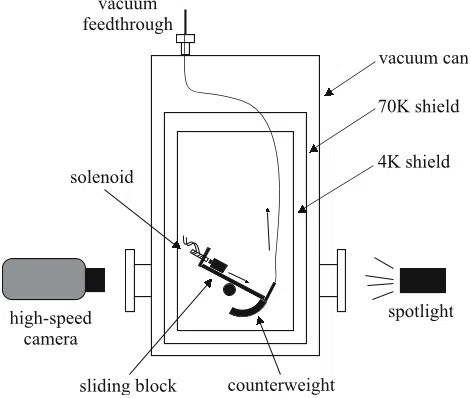
Figure 2. Schematic diagram of the cryostat and sliding block trib-
ometer. The vee-shaped track can be rotated around a horizontal axis
by pulling against a counterweight with a thin flexible wire attached to
a vacuum feedthrough. In the actual experiment, the camera and the
light source were collinear with the axis of rotation.
132 J.C. Burton et al./Temperature dependence of friction in vaccum

and l
k
can be determined by using the video camera to
monitor the motion of the block. The forces on the
block are illustrated in figure 3. l
s
is determined by
slowly increasing the angle of inclin ation h until motion
begins at h = h
0
. h
0
is measured from the video image.
At h
0
, the component of the gravitat ional force pulling
the block down the track mgsinh
0
and the frictional
force retarding the motion
ffiffiffi
2
p
l
s
mgcosh
0
are in balance,
so the static coefficient of friction is
l
s
¼
tanh
0
ffiffiffi
2
p
ð1Þ
The coefficient of kinetic friction l
k
is determined by
analyzing the video frames of the motion of the block as
it slides down the track. To avoid the stick-slip motion
characteristic of sliding near the critical angle, sliding
friction measur ements were performed by clamping the
block at the end of the track using the solenoid, inclining
the track at an angle approximately 10° higher than the
critical angle, and then releasing the block. The block is
illuminated from behind using a conventional photo-
graphic lamp. The infrared filters on the shields mini-
mize the heat load on the tribometer; the temperature is
observed to rise approximately 0.5 K when the lamp is
turned on near 4 K, and less than 50 mK at higher
temperatures. We used a Phantom V7.2 camera which
produces digital images with 512 384 pixels at a typical
frame rate of 1000 fps; the spatial resolution of the im-
age using our optics is 250 microns per pixel. The
camera was carefully mounted in the horizontal position
to within ± 0.1° using a digital level. A software
package written in Mathematica using standard convo-
lution techniques tracks the position of a corner of the
block from one frame to the next and produces a list of
positions as a function of time. The acceleration is
determined by constructing a least squares fit of a qua-
dratic polynomial to the trajectory; a typical example is
shown in figure 4.
The high quality of the quadratic fit indicates that, to
a good approximation, the block slides with constant
acceleration a that can be determined from the second
derivative of the the best fit polynomial. It also implies
that if there is a term in the fric tional force proportional
to the logarithm of the velocity, it must be very small for
the conditions of our apparatus. The coefficient of
kinetic friction is determined from
l
k
¼
tanh
ffiffiffi
2
p
a
g
ffiffiffi
2
p
cosh
ð2Þ
The statistical uncertainty in the value of l
k
obtained
from data like those shown in figure 4 using Equation 2
is remarkably small and is of the order of 10
)3
. Uncer-
tainty in the angle introduces a systematic error of
roughly the same amount.
3. Friction as a function of temperature
Friction measurements as described above were per-
formed using steel balls on three types of tracks: stain-
less steel, polished sapphire, and PTFE coated steel
shown in figures 5, 6 and 8, respectively. One run was
done using sapphire balls on a sapphire plate as shown
in figure 7. Each experimental run was started with a
new set of balls in the block and a fresh sample of the
track material. We found that the run-in history of the
samples strongly affected the friction. Each set of mea-
surements is denoted in the figures by colors and sym-
bols labeled ‘‘cooldown1’’, ‘‘cooldown2’’ , ‘‘warmup1’’,
‘‘warmup2’’, etc., which describe the thermal cycling as
well as the wear history of the sample. All of the
experimental runs were started with the tribometer and
the cryostat shields near room temperature and the
pressure at approximately 10
)6
Torr. For the hard
track materials, steel and sapphire, this first friction
Figure 3. Free body diagram showing the total forces on the sliding
block. The factors of
ffiffiffi
2
p
are due to fact that the load bearing faces of
the block are inclined at an angle of 45°, as shown in figure 1. The total
normal force is made up of the sum of the normal force exerted by each
face of the vee: mgcosðÞ
ffiffiffi
2
p
þ mgcosðÞ
ffiffiffi
2
p
¼
ffiffiffi
2
p
mgcosðÞ.
Figure 4. Displacement of the block parallel to the track as a function
of time. Open circles are the position determined from the video
frames. The solid curve is a least squares fit of a quadratic polynomial.
The coefficient of the quadratic term is directly related to the
acceleration.
J.C. Burton et al./Temperature dependence of friction in vaccum 133

measurement gave the lowest values we observed
throughout the sequence of measurements. Next, the
temperature of the cryostat shields was lowered to their
final values and simultaneously, the temperature of the
tribometer was raised to approximately 400 K. This
presumably has the effect of outgassing the tribometer
surfaces and cryopumping the apparatus. The temper-
ature of the trib ometer was then ramped several times
from approximately 400 K down to 4 K and back again,
and friction measurements were obtained at intervals of
approximately 20 K. A noteworthy feature of the data is
that although the statistical error in l obtained from a
single slide down the track was very small, the fluctua-
tions in l obtained from a series of measurements at the
same or similar temperatures was much larger.
Our results for friction of steel on steel as a function
of temperature are shown in figure 5. The Hertzian
contact stress is computed assuming 5 balls are in con-
tact, and is approximately 232 MPa. At room temper-
ature, the kinetic friction coefficient l
k
is initially 0.15,
but during the first cooling cycle, it rises to approxi-
mately 0.3. We believe most of this change can be
attributed to the rapid wear that occurs in high vacuum
[15, 16]. l
k
increases very gradually over several cooling
and heating cycles, which is also presumably due to
wear. The only substantial temperature dependence
evolves after consider able wear, when the samples show
a reproducible and reversible increase from l
k
G0.4
to l
k
G0.8 in the range 300K < T < 450K. The static
friction coefficient l
s
qualitatively follows the same
pattern.
The friction data for steel on sapphire is shown in
figure 6. The Hertzian contact stress is approximately
276 MPa. The initial values of l
k
are approximately
0.15, but as the sample wears in, l
k
increases to the
range 0.4–0.45. There is very little temperature depen-
dence, particularly below 250 K. Above 250 K l
k
decreases slightly with temperature. The static friction
coefficient shows qualitati vely the same behavior. The
friction of sapphire on sapphire shown in figure 7 also
follows the same pattern: initially, the friction is very
(a)
(b)
Figure 5. Friction coefficients of stainless steel on stainless steel as a
function of temperature. The symbols indicate whether the data was
taken on heating or cooling, and the line segments connecting the data
points indicate the order in which they were measured. (a) static
friction, (b) sliding friction.
(a)
(b)
Figure 6. Friction coefficients of stainless steel on sapphire as a
function of temperature. The symbols indicate whether the data was
taken on heating or cooling, and the line segments connecting the data
points indicate the order in which they were measured. (a) static fric-
tion, (b) sliding friction.
134 J.C. Burton et al./Temperature dependence of friction in vaccum

low, but the wear caused by a few sliding cycles
increases l
k
to approximately 0.4, and it becomes
independent of temperature. These values are consistent
with previous measurements at room temperature in
vacuum [17].
The friction data for steel on PTFE is shown in fig-
ure 8. The Hertzian contact stress is approximately
2.64 MPa. Below 200 K, there is essentially no temper-
ature dependence of either l
k
or l
s
. In contrast to the
hard materials, the effects of wear appear to be minimal,
and the friction coefficient measurements show no sys-
tematic variation with the number of sliding cycles.
Between 250 and 450 K, there is significant and
repeatable temperature dependence which is hysteretic.
In contrast again with the hard materials, the kinetic
and static friction coefficients on PTFE show opposite
behaviors: the static friction coefficient drops by nearly a
factor of 5 from l
s
= 0.25 at T = 200 K to l
s
= 0.06
at T = 450 K, while the kinetic friction has a feature at
T = 370 K which is a maximum on warming and a
minimum on cooling. The position of the maximum and
minimum depend on the cooling and heating rate. The
characteristic relaxation time for the transition from one
state to another is approximately 3 h. This hysteretic
behavior may be due to a phase transition that is known
to occur in PTFE in the vicinity of 300 K [18, 19].
After the sliding measurements on each sample were
completed, the track was examin ed for evidence of wear.
Optical microphotographs are shown in figure 9. For the
steel-PTFE system, no particles were observed, and there
was no optically detectable transfer film on the steel ball,
but the track in the PTFE was visible, primarily due to an
increased reflect ivity; the track had a smooth appearance
with no apparent scratches. For the steel on steel system,
we observed clearly visible wear tracks which roughened
the mir ror-like finish of the sliding surfa ce. The track is
composed of many small scratches parallel to the direc-
tion of motion which are approximately 300 microns in
length. Both steel and sapphire balls on sapphire pro-
duced a visible track in the sapphire as well as numerous
fine white particles which were presumably sapphire. The
sapphire ball showed stress cracks and both the sapphire
and steel balls were covered with clumps of the fine white
particles.
(a)
(b)
Figure 7. Friction coefficients of sapphire on sapphire as a function of
temperature. The symbols indicate whether the data was taken on
heating or cooling, and the line segments connecting the data points
indicate the order in which they were measured. (a) static friction, (b)
sliding friction.
(a)
(b)
Figure 8. Friction coefficients of steel on PTFE (Teflon) coating as a
function of temperature. The symbols indicate whether the data was
taken on heating or cooling, and the line segments connecting the data
points indicate the order in which they were measured. (a) static
friction, (b) sliding friction.
J.C. Burton et al./Temperature dependence of friction in vaccum 135