
All figures (9)
 Fig. 1: The UAM used in the experiments is composed of a 4 DoF quadrotor, commanded at high-level by 3 linear and an angular velocities (νx, νy , νz and ωz), and a 6 DoF robotic arm with joints qj , j = 1...6; and world, camera, tool and body reference frames indicated by the letters w, c, t and b, respectively.
Fig. 1: The UAM used in the experiments is composed of a 4 DoF quadrotor, commanded at high-level by 3 linear and an angular velocities (νx, νy , νz and ωz), and a 6 DoF robotic arm with joints qj , j = 1...6; and world, camera, tool and body reference frames indicated by the letters w, c, t and b, respectively. Fig. 2: Effects of noise in both IBVS and UIBVS during a simulated servo task. Figures a) and b) correspond to camera velocities subject to white noise with 1 mm standard deviation in the focal length. Figures c) and d) are control point trajectories in the image plane.
Fig. 2: Effects of noise in both IBVS and UIBVS during a simulated servo task. Figures a) and b) correspond to camera velocities subject to white noise with 1 mm standard deviation in the focal length. Figures c) and d) are control point trajectories in the image plane. Fig. 9: Actuator velocities in a real experiment corresponding to the individual contributions of each subtask: visual servoing, CoG alignment and joint limits.
Fig. 9: Actuator velocities in a real experiment corresponding to the individual contributions of each subtask: visual servoing, CoG alignment and joint limits. TABLE II: Time to completion statistics for multiple realizations of a simulated experiment considering different subtask arrangements and comparing two control law definitions.
TABLE II: Time to completion statistics for multiple realizations of a simulated experiment considering different subtask arrangements and comparing two control law definitions. TABLE I: Denavit-Hartenberg parameters of our 6 DoF arm.
TABLE I: Denavit-Hartenberg parameters of our 6 DoF arm.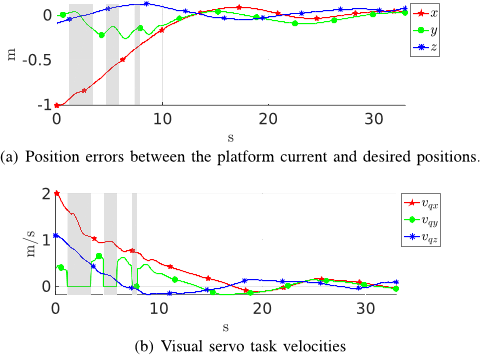 Fig. 3: Example of the safety task in action, with the inflation radius set to 0.5m, when an obstacle appears 0.2m to the left of the expected trajectory (quadrotor y body axis). In grey are the zones where the safety task is activated, thus deactivating the involved DoF for all other tasks, including the visual servo mission task.
Fig. 3: Example of the safety task in action, with the inflation radius set to 0.5m, when an obstacle appears 0.2m to the left of the expected trajectory (quadrotor y body axis). In grey are the zones where the safety task is activated, thus deactivating the involved DoF for all other tasks, including the visual servo mission task.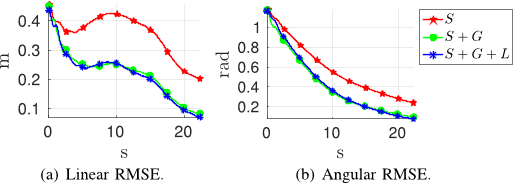 Fig. 4: Root mean square error (RMSE) for multiple simulations considering different subtask arrangements.
Fig. 4: Root mean square error (RMSE) for multiple simulations considering different subtask arrangements. Fig. 5: Comparison between weighted sum and hierarchical task composition, considering the time to reach the target (horizontal axis), and for randomly varying initial conditions (vertical axis).
Fig. 5: Comparison between weighted sum and hierarchical task composition, considering the time to reach the target (horizontal axis), and for randomly varying initial conditions (vertical axis). Fig. 6: Camera pose error during visual servoing. Comparison of using or not the hierarchical task priority control law with all the subtasks proposed.
Fig. 6: Camera pose error during visual servoing. Comparison of using or not the hierarchical task priority control law with all the subtasks proposed.








