
All figures (13)
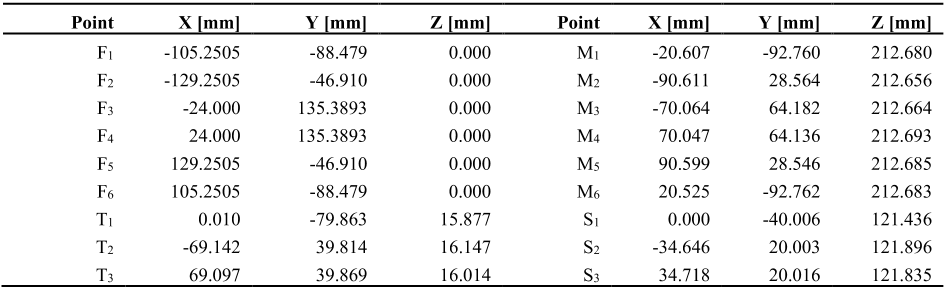
Table 2. Initial geometry for the calibration procedure. 
Fig. 8. Influence of number of poses on mean and maximum error. 
Fig. 7. Convergence graph of the calibration algorithm: a) first calibration (18 parameters, fixed joints); b) second calibration (36 parameters, fixed and mobile joints) 
Fig. 3. Algorithm for the identification of the parameters to calibrate. 
Fig. 6. Frame and double ball-bars for the calibration of Free-Hex. 
Fig. 1. Kinematic scheme of a Gough-Stewart platform. 
Fig. 4. Definition of a reference coordinate system. 
Fig. 2. Algorithm for the solution of forward kinematics. 
Table 4. Results of the second calibration (36 parameters, fixed and mobile joints). 
Table 3. Results of the first calibration (18 parameters, fixed joints). 
Table 5. Results of the third calibration (54 parameters, fixed and mobile joints, sensors). 
Table 1. Reference geometry for the numerical example. 
Fig. 5. Free-Hex robot prototype.












