
All figures (10)
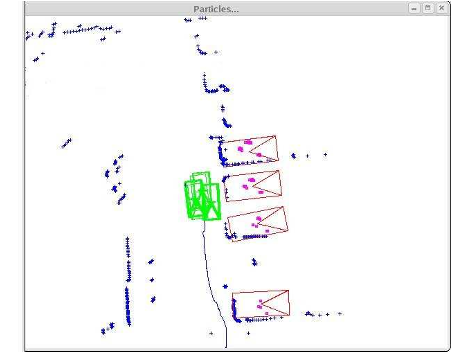
Fig. 10: Another mapping example 
Fig. 9: Final map obtained by fusion of different hypotheses 
Fig. 1. Overview showing the mapping process 
Fig. 4: Edge filtering with 2 bounding boxes. Shaded area indicates valid area 
Fig. 8: The various CyCab and landmark hypotheses 
Fig. 5: An example of a wrong hypothesis due to occlusion 
Fig. 6. Accepted vehicle hypothesis after stage 1 of vehicle detection 
Fig. 7. The same configuration as in figure 6 but with rejected vehicle hypothesis in their inner and outer bounding boxes after stage 2 of vehicle detection 
Fig. 3: Sensor Sub-Model bayesian program 
Fig. 2: Detection of vehicles bayesian program









